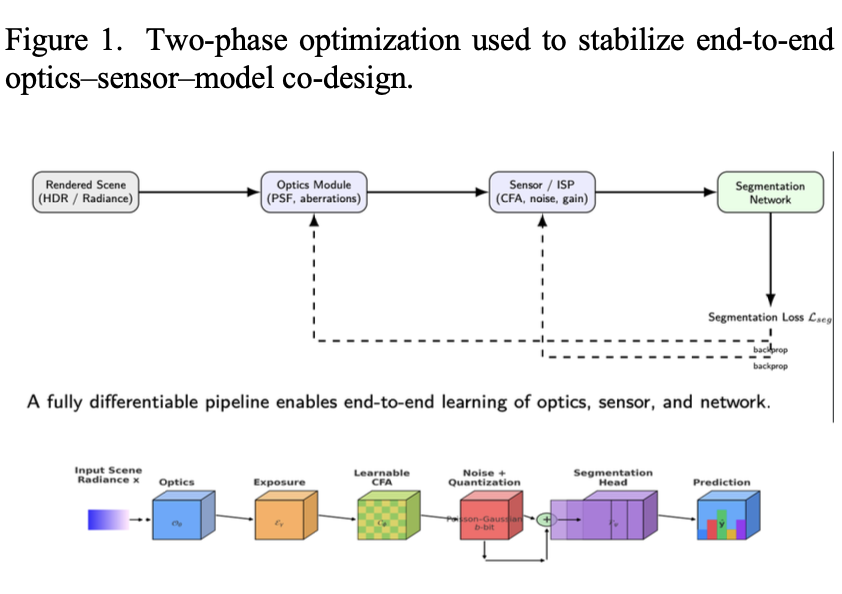
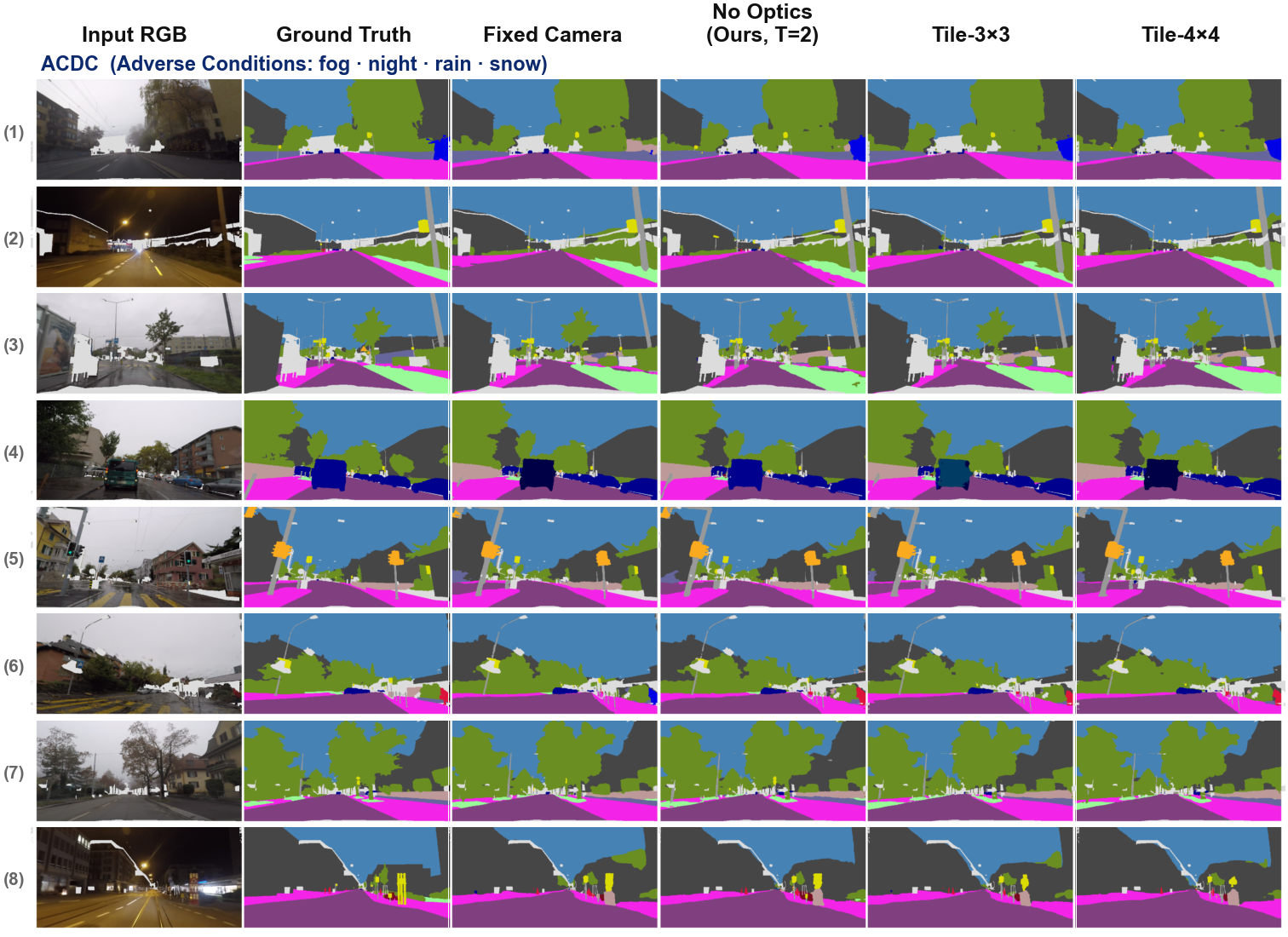
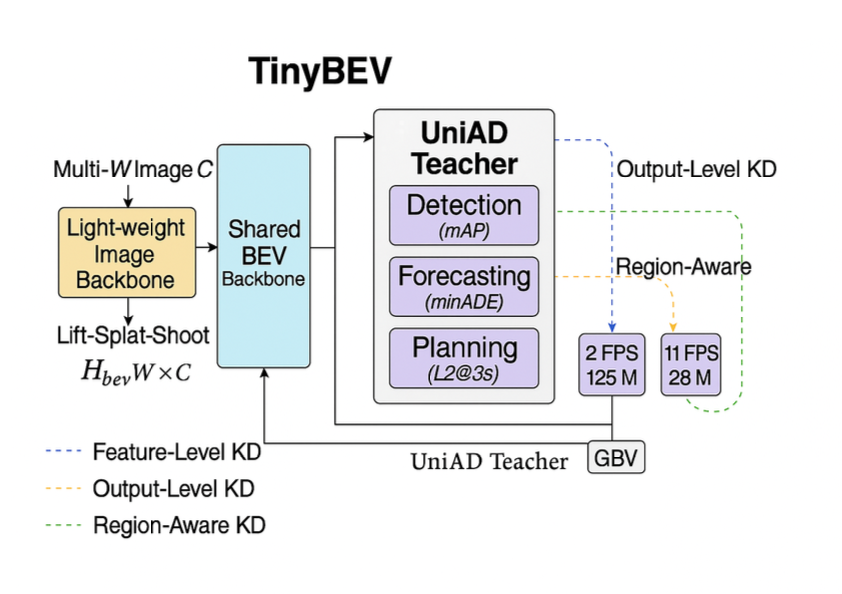
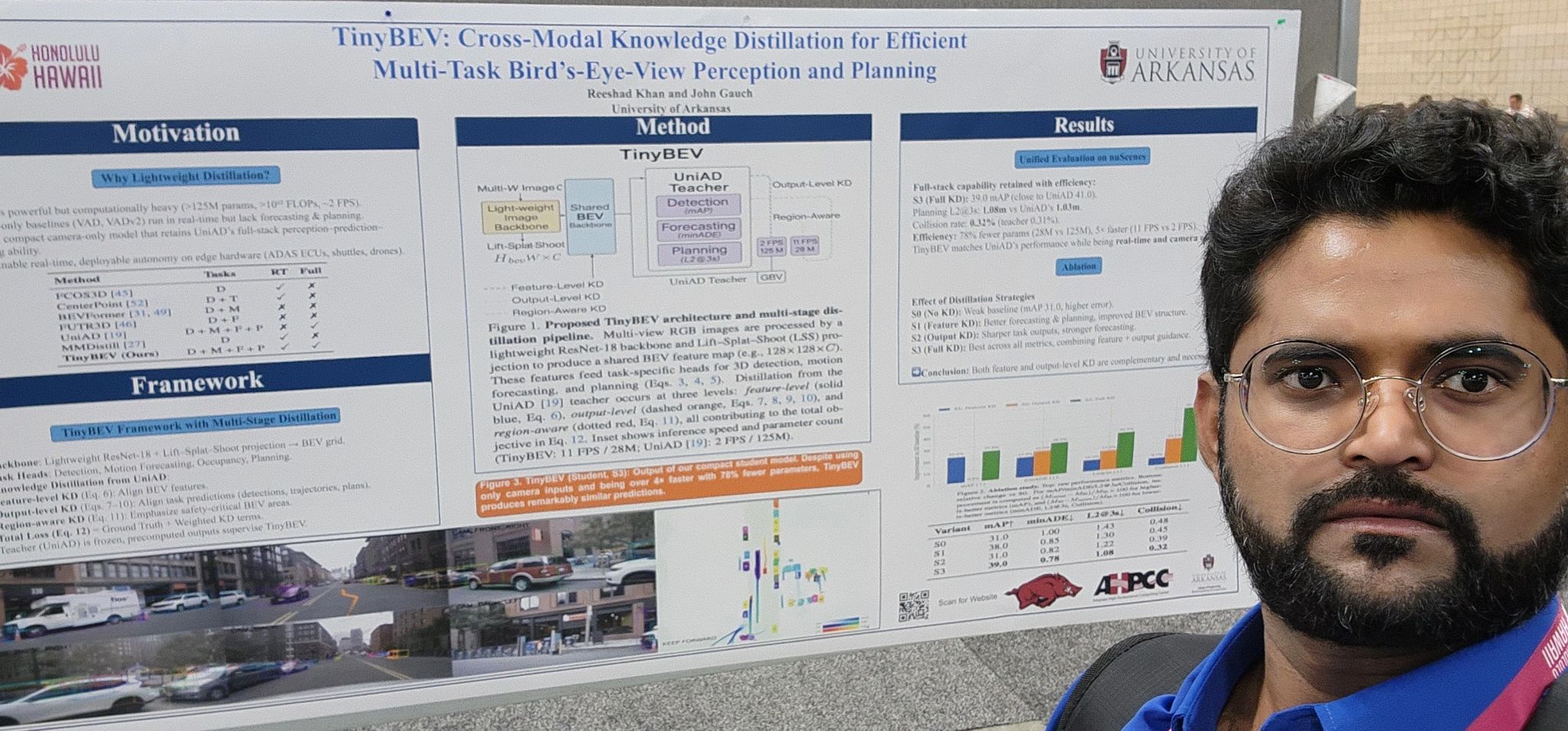
I build autonomous vehicle perception systems that are small, fast, and field-deployable. My Ph.D. work produced TinyBEV, a camera-only BEV model distilled from UniAD reaching 39.0 mAP and 0.32 collision rate at 11 FPS, 5× faster with 78% fewer parameters than the teacher. A parallel RAW-to-task co-design framework jointly optimizes optics, color filter array, and a ~1M-parameter segmentation head, gaining +6.8 mIoU over fixed pipelines at ~28 FPS on KITTI-360.
As a Postdoctoral Scholar at UCF CECS under Dr. Xishun Liao, I am now extending this work to AI-powered urban mobility: spatiotemporal trajectory mining, generative human/vehicle digital-twin simulation, and controllable scenario generation for autonomous vehicle testing at city scale.